Stereo Matching: Stereo matching




The idea of stereo matching is that, by comparing and matching pixels of two 2D images it is possible to infer the depth of those pixels and, therefore, it is possible to produce a disparity map which can be used to produce a 3D representation of the scene
Our goal was to develop an efficient algorithm capable of computing disparity maps of original pairs of 2D images.
We used cross corelation algorithm in order to get through intensity problem occuring between the two images as their exposure are sometimes slightly different, making a normal algorithm unable to match pixels.
We also used integral images in order to handle the huge amount of sums requiered by the Normalized cross corelation. It greatly improved the algorithm efficiency which now runs in 8 minutes for 1600x1200 pairs images.
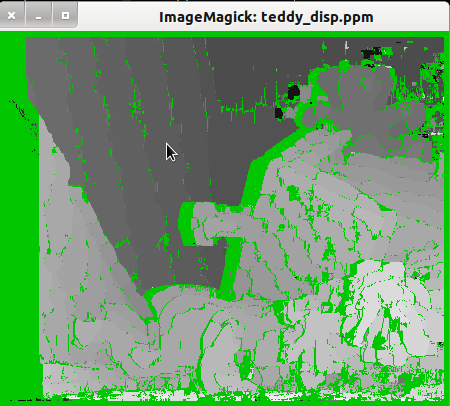
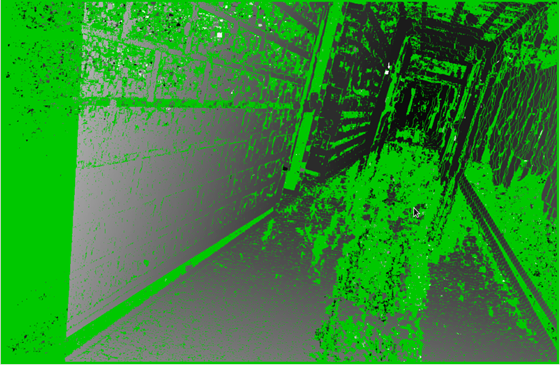
here are exemple of our outputs the images are in order: Left image, Right image and then the disparity map computed through our algorithm
Comments: 0
There are no comments yet, be the first to write a comment!